1. 텐서
2. 텐서와 좌표 변환
4. 맥스웰 방정식
5. 다이애드 그린 함수

 (1: 공변 벡터)
(1: 공변 벡터)
 (2: 반변 벡터)
(2: 반변 벡터)
 (3)
(3)
 (4: 반변 벡터의 공변 도함수)
(4: 반변 벡터의 공변 도함수)
 (5: 공변 벡터의 공변 도함수)
(5: 공변 벡터의 공변 도함수)
 (6)
(6)
 (7: 쿨롱의 법칙)
(7: 쿨롱의 법칙)
 (8: 패러데이의 법칙)
(8: 패러데이의 법칙)
 (9: 비오–사바르의 법칙)
(9: 비오–사바르의 법칙)
 (10: 변위 전류 포함 암페어의 법칙)
(10: 변위 전류 포함 암페어의 법칙)
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
 (15)
(15)
 (16)
(16)
[다음 읽을거리]
1. 변환 전자기학
5. 다이애드 그린 함수
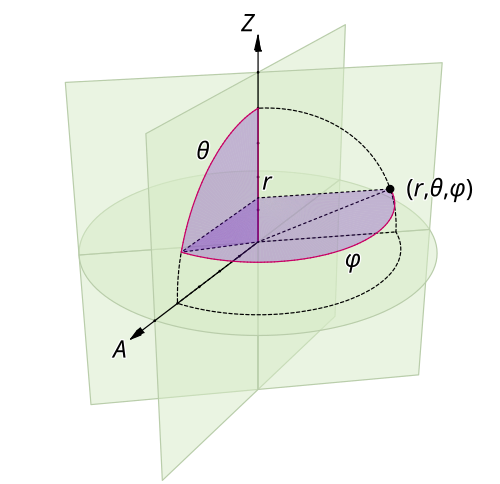
[그림 1] 일반 좌표계의 모양(출처: wikipedia.org)
좌표 불변성(coordinate independent or coordinate invariant)을 특징으로 하는 텐서(tensor)를 이용하면 맥스웰 방정식(Maxwell's equations)을 임의의 좌표계에서 기술할 수 있다. 상식적으로 생각해도 전기(electricity)와 자기(magnetism)의 특성을 기술하는 맥스웰 방정식은 좌표계 선택과는 관계없이 성립할 것 같다. 왜냐하면 좌표계는 우리가 편미분 방정식을 쓰기 위해 도입한 선택적인 개념이기 때문이다. 이런 상식을 수학적으로 절묘하면서도 아름답게 표현한 기법이 텐서 이론이다. 먼저 벡터 함수(vector function)를 표현하기 위해 공변 벡터(共變, covariant vector)와 반변 벡터(反變, contravariant vector)를 정의하자.
(1: 공변 벡터) (2: 반변 벡터)
벡터 함수 $F$는 텐서 이론을 이용하여 [그림 1]과 같은 일반 좌표계(generalized or curvilinear coordinate system) $U$에서 정의할 수 있다.
(3)
여기서 $f^i, f_i$는 각각 공변과 반변 벡터가 기저 벡터(basis vector)인 경우의 좌표값이다. 텐서 미적분학(tensor calculus)에서 도입한 공변 도함수(covariant derivative)를 이용하면 반변 벡터와 공변 벡터를 미분할 수 있다.
(4: 반변 벡터의 공변 도함수) (5: 공변 벡터의 공변 도함수)
텐서에서는 델(del) 혹은 나블라(nabla) 연산자를 새롭게 정의한다.
(6)
새롭게 정의한 식 (6)을 아래의 맥스웰 방정식에 대입하자.
(7: 쿨롱의 법칙) (8: 패러데이의 법칙) (9: 비오–사바르의 법칙) (10: 변위 전류 포함 암페어의 법칙)여기서 $\bar M$은 자류 밀도(magnetic current density)이다. 그러면 공변 도함수를 이용해 발산과 회전 연산자를 일반 좌표계에 적용한 맥스웰 방정식을 얻을 수 있다.
(11)
여기서 $\varepsilon_{ijk}$는 레비-치비타 기호(Levi-Civita symbol)이며 $\mathcal{G}$는 계량 텐서(metric tensor)의 행렬식(determinant)이다. 텐서 미적분학에서 소개한 복잡한 계산을 이용하면 식 (11)은 아래의 텐서 기반 맥스웰 방정식(tensor based Maxwell's equations)으로 변환할 수 있다.
(12) (13) (14) (15)
위의 텐서 기반 맥스웰 방정식에서 공변 벡터와 반변 벡터가 섞여있음을 눈여겨 봐야 한다. 만약 공변 벡터와 반변 벡터를 상호 교환하려면 아래 식을 사용하면 된다.
(16)
식 (12)에서 (15)는 다소 복잡해 보이지만 좌표계에 관계없이 성립하는 가장 일반화된 맥스웰 방정식이다.
[다음 읽을거리]
1. 변환 전자기학



 (2)
(2) (3)
(3)
 (5)
(5) (6)
(6) (7)
(7) (8)
(8) (9)
(9) (10)
(10) (11)
(11) (12a)
(12a) (12b)
(12b)
 (14)
(14) (15)
(15) (16a)
(16a) (16b: $\pm x$축 근방)
(16b: $\pm x$축 근방) (16c: $\pm y$축 근방)
(16c: $\pm y$축 근방) (16d: $\pm z$축 근방)
(16d: $\pm z$축 근방)


 (19)
(19) (20)
(20) (21)
(21)
 (23a)
(23a) (23b)
(23b)


 (26b)
(26b) (26c)
(26c) (27)
(27) (28a)
(28a) (28b)
(28b) (28)
(28) (29)
(29) (30)
(30) (31)
(31)